|
Lei Tai (邰磊)
Email: ltai AT connect DOT ust DOT hk
|
|
Research
My research interests mainly include deep reinforcement learning and learning from demonstrations on mobile robots.
I have also worked in exploration of reinforcement learning, 3D perception for autonomous driving and human gaze in imitation learning.
Representative works are highlighted.
|
|
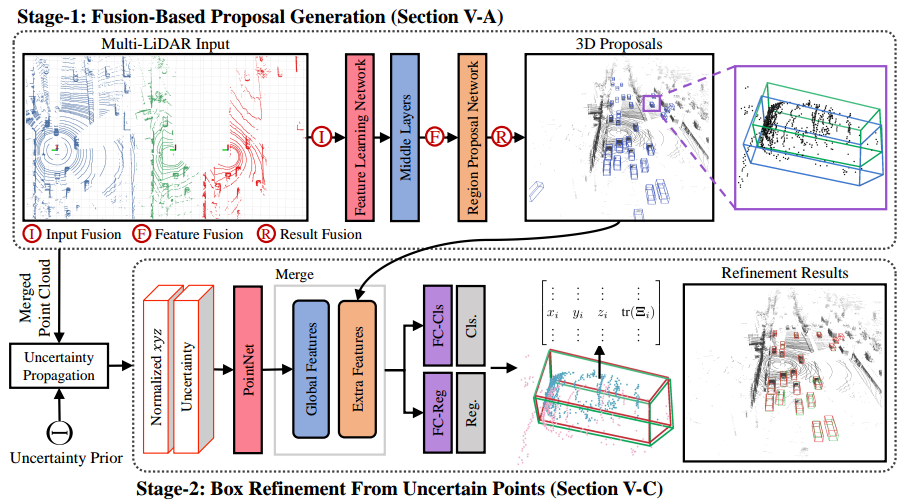
MLOD: Awareness of Extrinsic Perturbation in Multi-LiDAR 3D Object Detection for Autonomous Driving.
IROS, 2020
Jianhao Jiao*,
Peng Yun*,
Lei Tai,
Ming Liu
pdf/
bibtex/
video/
code/
project page
|
|
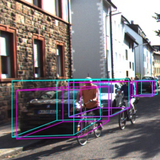
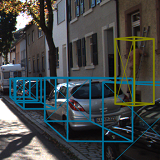
MonoPair: Monocular 3D Object Detection Using Pairwise Spatial Relationships.
CVPR, 2020
Yongjian Chen,
Lei Tai,
Kai Sun,
Mingyang Li
pdf /
bib /
supplement /
page /
video
|

|
High-speed Autonomous Drifting with Deep Reinforcement Learning.
IEEE Robotics and Automation Letters (RA-L), 2020
ICRA, 2020
Peide Cai*,
Xiaodong Mei*,
Lei Tai,
Yuxiang Sun,
Ming Liu
arxiv /
bibtex /
page /
video /
code
|
|
|
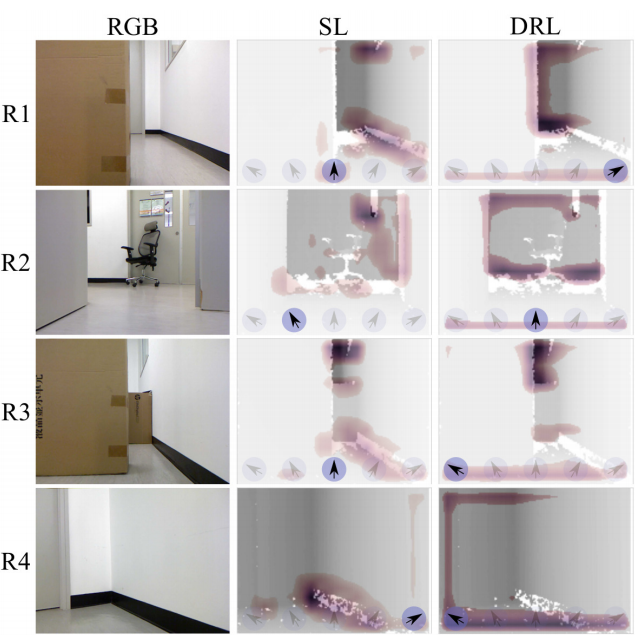
Visual-based Autonomous Driving Deployment from a Stochastic and Uncertainty-aware Perspective.
IROS, 2019
Lei Tai,
Peng Yun,
Yuying Chen,
Congcong Liu,
Haoyang Ye,
Ming Liu
pdf /
bibtex /
video /
code
|
|
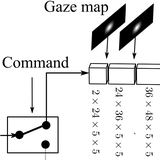
Gaze Training by Modulated Dropout Improves Imitation Learning.
IROS, 2019
Utilizing Eye Gaze to Enhance the Generalization of Imitation Network to Unseen Environments.
ICML workshop, 2019
Yuying Chen*,
Congcong Liu*,
Lei Tai,
Ming Liu,
Bertram Shi
arXiv /
bibtex
|

|
A Gaze Model Improves Autonomous Driving.
ETRA, 2019
Congcong Liu*,
Yuying Chen*,
Lei Tai,
Haoyang Ye,
Ming Liu,
Bertram Shi
bibtex /
page /
video
|
|
|
Focal Loss in 3D Object Detection.
IEEE Robotics and Automation Letters (RA-L), 2019
ICRA, 2019
Peng Yun,
Lei Tai,
Yuan Wang,
Chengju Liu,
Ming Liu
pdf /
bibtex /
page /
code
|
|
|
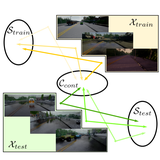
VR-Goggles for Robots: Real-to-sim Domain Adaptation for Visual Control.
IEEE Robotics and Automation Letters (RA-L), 2019
Jingwei Zhang*,
Lei Tai*,
Peng Yun,
Yufeng Xiong,
Ming Liu,
Joschka Boedecker,
Wolfram Burgard
(*indicates equal contribution)
pdf /
bibtex /
supplement /
page /
video
|
|
|
Curiosity-driven Exploration for Mapless Navigation with Deep Reinforcement Learning.
ICRA workshop, 2018
Oleksii Zhelo,
Jingwei Zhang,
Lei Tai,
Ming Liu,
Wolfram Burgard
pdf /
bibtex /
page /
video
|
|
A Survey of Deep Network Solutions for Learning Control in Robotics: From Reinforcement to Imitation.
arXiv 1612.07139
Lei Tai*,
Jingwei Zhang*,
Ming Liu,
Joschka Boedecker,
Wolfram Burgard
(*indicates equal contribution)
arXiv /
bibtex
|
|
|
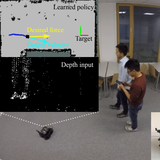
Socially Compliant Navigation through Raw Depth Inputs with Generative Adversarial Imitation Learning.
ICRA, 2018
Lei Tai,
Jingwei Zhang,
Ming Liu,
Wolfram Burgard
pdf /
bibtex /
dataset /
video
|
|
Neural SLAM: Learning to Explore with External Memory.
arXiv 1706.09520
Jingwei Zhang,
Lei Tai,
Joschka Boedecker,
Wolfram Burgard,
Ming Liu
arXiv /
bibtex /
video
|
|
|
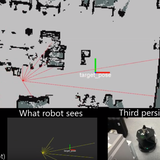
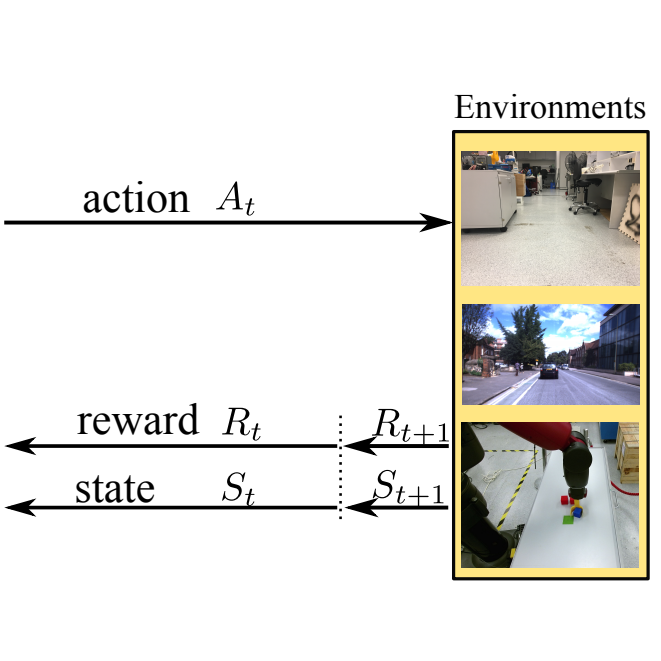
Virtual-to-real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation.
IROS, 2017
Lei Tai,
Giuseppe Paolo,
Ming Liu,
pdf /
bibtex /
video
|
|
Towards Cognitive Exploration through Deep Reinforcement Learning for Mobile Robots.
arXiv 1610.01733
Lei Tai,
Ming Liu
arXiv /
bibtex
|
|
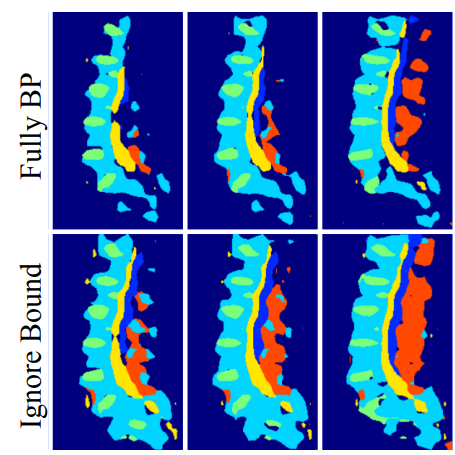
PCA-aided Fully Convolutional Networks for Semantic Segmentation of Multi-channel fMRI.
International Conference on Advanced Robotics, 2017
(best student paper award)
Lei Tai,
Haoyang Ye,
Qiong Ye,
Ming Liu
pdf /
bibtex
|
|
A Robot Exploration Strategy Based on Q-learning Network.
IEEE International Conference on Real-time Computing and Robotics(RCAR), 2016
Mobile robots exploration through cnn-based reinforcement learning.
Robotics and Biomimetics, 2016
Lei Tai,
Ming Liu
pdf /
bibtex
|
|
A Deep-network Solution Towards Model-less Obstacle Avoidance.
IROS, 2016
Autonomous exploration of mobile robots through deep neural networks.
International Journal of Advanced Robotic Systems(IJARS), 2017
Lei Tai,
Shaohua Li,
Ming Liu
pdf /
bibtex /
dataset
|
 |
Journal Reviewer for AURO, IEEE Trans-NNLS, IJARS and IEEE RA-L.
Conference Reviewer for ICRA 2017-20, IROS 2016-20 and CoRL 2019.
|
|